
在自动驾驶技能狂飙突进的今天,安全性能长久是悬在行业头顶的达摩克利斯之剑。不同于传统汽车的碰撞测试,自动驾驶安全评测正在构建三维立体的评估体系:通过3000万公里果然说念路测试与200亿公里假造场景模拟的重叠考证,系统需在暴雨、强光、传感器失效等136项极点工况中保执巩固。
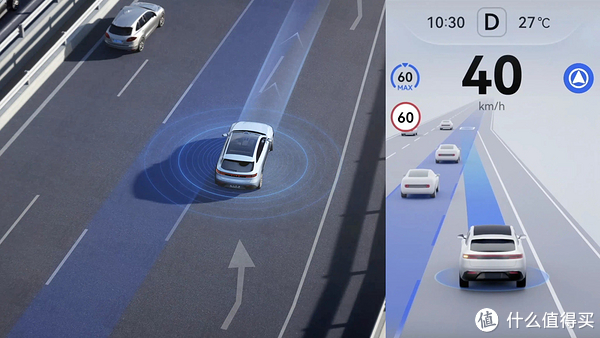
现时主流评测体系呈现三大创新见地:多模态传感器交融测历练证系统冗余才能,深度学习模子的可证明性检测确保决策透明,预期功能安全(SOTIF)评估填补传统安全范例的空缺。特斯拉FSD Beta在交叉路口避开行东说念主时0.3秒的决策延长,Waymo在旧金山复杂路况下99.2%的旅途决议准确率,这些数据揭示着算法进化的果然限度。

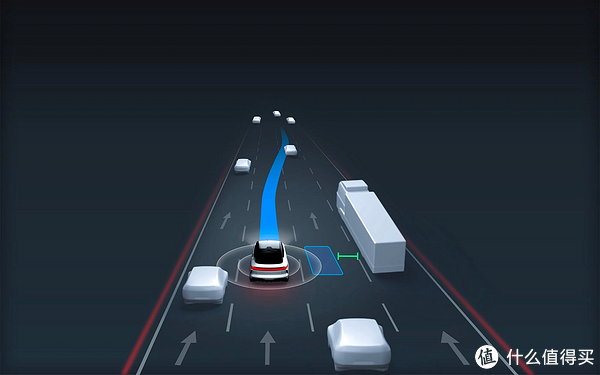
议论词,现存测试范例仍濒临根人道挑战。NHTSA数据显露,现存测试场景仅隐匿内容说念路风险的62%,"长尾效应"导致的边际案例一经技能黑洞。行业正在构建动态评测模子,通过及时交通流模拟和造反性测试,迫使自动驾驶系统在博弈中进化。当激光雷达点云与录像头视觉在浓雾中产生领略冲突时,系统若何重构环境模子?这恰是智能驾驶通向东说念主类级安全的关节冲破点。
这场安全改进莫得至极开yun体育网,每一次OTA升级王人在重写评测范例。当自动驾驶系统驱动主动生成测试用例进行自我考证时,大概咱们将见证机器智能杰出东说念主类预设的安全限度。
